|
Анимация механизмов
Вверх
ШАРАПОВ К.М.
магистрант МГТУ СТАНКИН, Кафедра "Системы Пластического Деформирования"
МОДЕЛИРОВАНИЕ И АНАЛИЗ ШАРНИРНО–РЫЧАЖНОГО МЕХАНИЗМА С ИСПОЛЬЗОВАНИЕМ ГРАФИЧЕСКОГО ПАКЕТА T-FLEX CAD
Аннотация
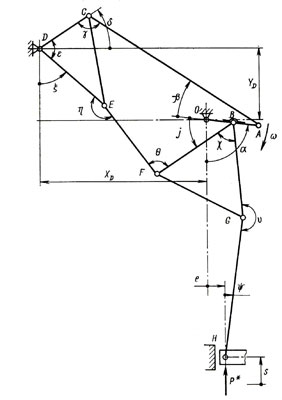
Рис.1: КИНЕМАТИЧЕСКАЯ СХЕМА МЕХАНИЗМА
Восьмизвенный исполнительный механизм (Рис.1) внутреннего ползуна листоштамповочного пресса состоит из шарнирного кривошипно-коромыслового четырехзвенника OACD, а также пятизвенников DEвнFвнBO и OBGвнHвн, входное звено - кривошип OA .(Индекс вн на рисунках 1 и 2 означает, что механизм имеет внутреннее расположение ползуна).
Предполагается, что величины всех звеньев механизма, а также величины углов между жестко соединенными звеньями, за исключением угла входного звена, дабы обеспечить заданный закон движения выходного звена, являются исходными данными, однако допускается их незначительное изменение.
Инструкция по использованию анимационной модели 8-ми
звенного листоштамповочного пресса в графическом пакете
T-FLEX CAD 10
1.Для полноценной работы анимационной модели Вам понадобится версия графического пакета T-FLEX CAD 10 или T-FLEX CAD 10 (студенческая версия).
2.После того как вы открыли файл (8-ми звенник модель "sharapov.GRB.grs" или 3d модель с аналогичным расширением "sharapov_3d.GRB.grs") перед вами: в правом углу листа будет отображаться сама модель многозвенника, а в левом углу так называемые «треугольники сил» на которых и будут отображаться: как направление, так и величина сил действующих в узлах многозвенника в реальном времени. Для более комфортного просмотра рекомендуется отключить видимость вспомогательных прямых путям нажатия на клавишу с изображением солнечных очков и двух перпендикулярных пунктирных прямых (данная клавиша расположена на панели «Вид» которая располагается с правой стороны от модели).
3.Анимацию механизма можно осуществить двумя способами:
- изменяя угол входного звена механизма OBA в ручном режиме (для этого необходимо зайти в режим изменения построения: клавиша с изображением ножниц перерезающих пунктирную прямую, клавиша расположена на панели инструментов «Стандартная». После входа в режим изменения подвести курсор ко входному звену и нажать левую клавишу мыши затем путем перемещения курсора против или по часовой стрелке изменять величину угла поворота входного звена OBA)
- изменяя угол входного звена механизма OBA в автоматическом режиме (для этого необходимо войти в пункт Анимация (Параметры-> Анимация) и в появившемся окне указать следующие параметры имя переменной: alfa, начальное, конечное значение, а также шаг анимации можно задать произвольно в соответствии с желаемым результатом. Необходимо также установить «галочки» в пункте меню «очистка экрана» дабы обновлять изображение с частотой соответствующей шагу анимации. Также необходимо отметить пункт меню «панель управления». Остальные параметры остаются на усмотрение пользователя. После ввода параметров нажать клавишу OK и наблюдать за процессом. После завершения процесса анимации и остановки модели нажать клавишу Esc.
4.Существует также возможность изменения исходных размеров и параметров механизма. Для изменения таковых необходимо зайти в «редактор переменных» модели (для этого необходимо нажать на клавишу с изображением калькулятора, клавиша расположена на панели инструментов «Стандартная») После нажатия на данную клавишу перед пользователем появляется окно редактора в котором он меняет требуемые параметры, после изменения и для вступления их в силу следует нажать клавишу OK.
В состав работы входят:
|