|
Анимация механизмов
Вверх
Яновская О.В. и Чистяков Ю.Д.
магистранты МГТУ СТАНКИН, Кафедра "Робототехника и Мехатроника"
Аннотация
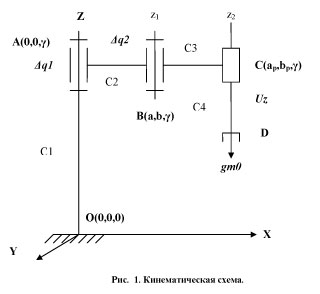
Звено 1 неподвижно, начало отчета совпадает с началом координат О(0,0,0). К звену 1 с помощью одностепенного шарнира прикреплено звено 2; угол поворота этого звена определяется переменной дельтаq1, при этом положительным считается направление против часовой стрелки, а началом отчета продольная ось звена 1. Звено 3 присоединяется к звену 2, также с помощью одностепенного шарнира; угол поворота определяется переменной дельтаq2, положительным считается направления вращения против часовой стрелки, а началом отчета продольная ось звена 2. К звену 3 прикреплен ползун, который движется вдоль звена 4, величина вертикального смещения ползуна задается переменной Uz. На конце звена 4 установлено захватное устройство; общая масса устройства и объекта манипулирования равна m0.
Каждое звено характеризуется массой m, моментом инерции J, и центром масс С.
В состав работы входят:
|